#include "MotionCaptureMovement.h"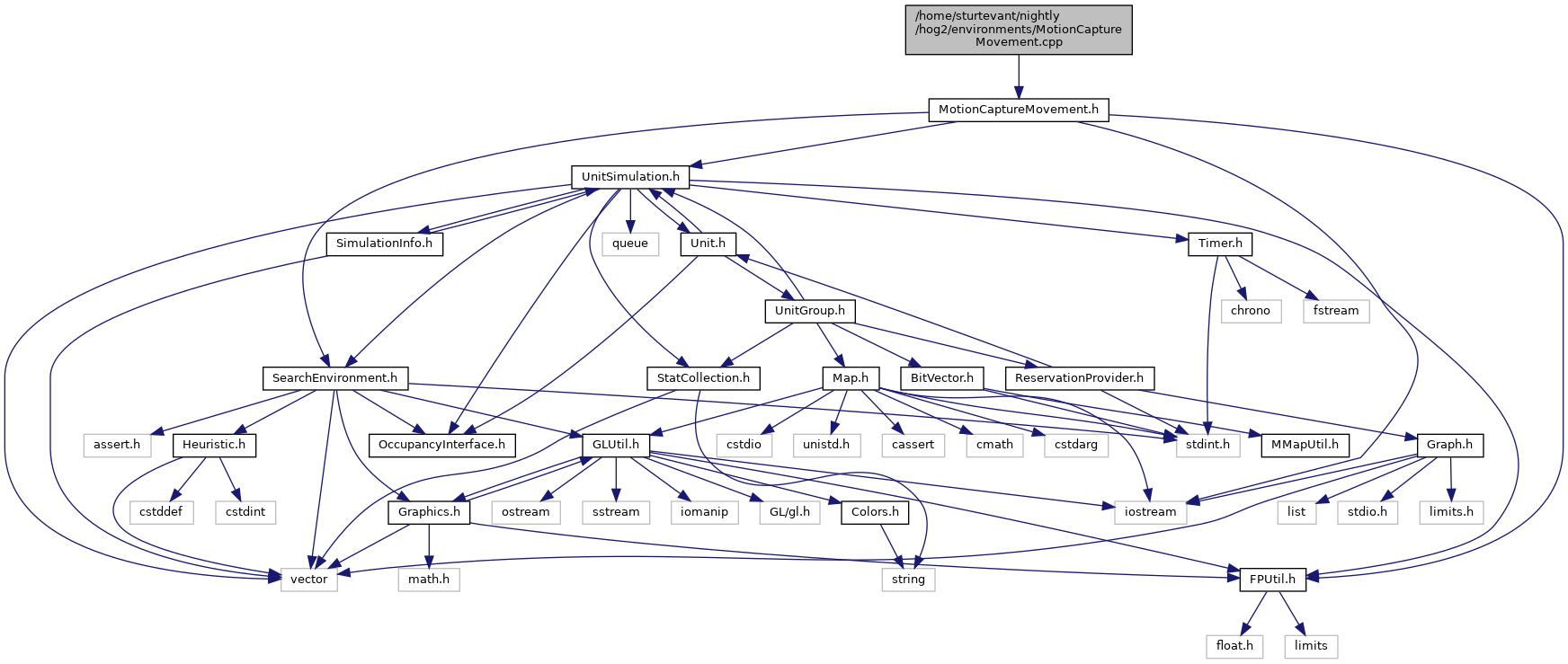
Go to the source code of this file.
Classes | |
| struct | mcData |
Variables | |
| const double | worldSize = 20 |
| const double | goalTolerance = 0.5 |
| const int | numActions = 27 |
| mcData | d [] |
Variable Documentation
◆ d
| mcData d[] |
Definition at line 21 of file MotionCaptureMovement.cpp.
Referenced by DWG::DynamicWeightedGrid< sectorSize >::AddEdge(), PDBHeuristic< TOHState< patternDisks >, TOHMove, TOH< patternDisks >, TOHState< totalDisks > >::AdditiveForwardThreadWorker(), MNPuzzle< width, height >::AdditiveGCost(), AirplaneEnvironment::AirplaneEnvironment(), MCEnvironment::ApplyAction(), Rubik7Edge::ApplyAction(), PDBHeuristic< TOHState< patternDisks >, TOHMove, TOH< patternDisks >, TOHState< totalDisks > >::BackwardThreadWorker(), DWG::DynamicWeightedGrid< sectorSize >::BFS(), EBSearch< state, action, environment, DFS >::BinarySearch(), bits(), MapCliqueAbstraction::cliqueAbstractGraph(), Graphics::Display::data::data(), OptimisticSearch< state, action, environment >::DoSingleSearchStep(), LineTransition::Draw(), FallingBoxTransition::Draw(), BOAStar< state, action, environment >::Draw(), AStarEpsilon< state, action, environment >::Draw(), DWG::DynamicWeightedGrid< sectorSize >::Draw(), Focal< state, action, environment >::Draw(), FocalAdd< state, action, environment >::Draw(), NBS< state, action, environment, dataStructure, priorityQueue >::Draw(), DynamicPotentialSearch< state, action, environment >::Draw(), OptimisticSearch< state, action, environment >::Draw(), BOAStar< state, action, environment >::DrawAllPaths(), AStarEpsilon< state, action, environment >::DrawFocal(), BOAStar< state, action, environment >::DrawFrontier(), BOAStar< state, action, environment >::DrawGoal(), Racetrack::DrawLine(), AStarEpsilon< state, action, environment >::DrawOpen(), EBSearch< state, action, environment, DFS >::ExponentialSearch(), PDBHeuristic< TOHState< patternDisks >, TOHMove, TOH< patternDisks >, TOHState< totalDisks > >::ForwardBackwardThreadWorker(), PDBHeuristic< TOHState< patternDisks >, TOHMove, TOH< patternDisks >, TOHState< totalDisks > >::ForwardThreadWorker(), MNPuzzle< width, height >::GCost(), ConfigEnvironment::GetAction(), MCEnvironment::GetActions(), DWG::DynamicWeightedGrid< sectorSize >::GetActions(), BOAStar< state, action, environment >::GetClosestGoal(), DWG::DynamicWeightedGrid< sectorSize >::GetEdges(), DWG::DynamicWeightedGrid< sectorSize >::GetRegions(), DWG::DynamicWeightedGrid< sectorSize >::GetSuccessors(), LocalApplyAction(), MM< state, action, environment, priorityQueue >::PrintHDist(), fMM< state, action, environment, priorityQueue >::PrintHDist(), aStarOld::relaxEdge(), praStar::relaxEdge(), RubiksCornerStateBits::Rotate(), RubiksCornerStateArray::Rotate(), Map2DHeading::SetCost(), DelayedHeuristicAStar< state, action, environment, batchHeuristic, openList >::SetDirected(), TemplateAStar< state, action, environment >::SetDirected(), GenericPatrolUnit< state, action, environment >::SetTrimWindow(), WeightedUnitGroup< state, action, environment >::SetUpdateOnQuery(), WeightedUnitGroup< state, action, environment >::SetUpdateSurrounding(), WeightedUnitGroup< state, action, environment >::SetWindowSize(), WeightedMap2DEnvironment::SetWindowSize(), SimpleNode< T >::SimpleNode(), DelayedHeuristicAStar< state, action, environment, batchHeuristic, openList >::SVGDrawDetailed(), TemplateAStar< state, action, environment >::SVGDrawDetailed(), RubiksCornerStateBits::Swap(), FixedSizeSet< T, Hash >::swap(), RubiksCornerStateArray::Swap(), Rubik7Edge::unrankPlayer(), RubiksCorner::unrankPlayer(), and RubikEdge::unrankPlayer().
◆ goalTolerance
| const double goalTolerance = 0.5 |
Definition at line 12 of file MotionCaptureMovement.cpp.
Referenced by MCEnvironment::GoalTest().
◆ numActions
| const int numActions = 27 |
Definition at line 19 of file MotionCaptureMovement.cpp.
Referenced by MCEnvironment::GetAction(), MCEnvironment::GetActions(), and MCEnvironment::GetSuccessors().
◆ worldSize
| const double worldSize = 20 |
Definition at line 11 of file MotionCaptureMovement.cpp.
Referenced by MCEnvironment::GetActions(), MCEnvironment::GetOpenGLCoord(), MCEnvironment::GetStateHash(), and MCEnvironment::GetSuccessors().
