#include <HeuristicLearningMeasure.h>
Public Member Functions | |
| double | MeasureDifficultly (environment *env, const state &start, const state &goal) |
| void | ShowHistogram () |
| void | OpenGLDraw (environment *env) const |
Private Types | |
| typedef std::unordered_map< uint64_t, stateData< state >, Hash64 > | EnvironmentData |
Private Member Functions | |
| double | SumLearningRequired () |
| void | BuildExactDistances (environment *env, const state &start, const state &goal) |
| double | LookupGCost (state &s) |
| double | LookupHCost (const state &s) |
| void | ComputeRequiredLearning (environment *env, const state &start, const state &goal) |
| void | ComputeConsistencyLearning (environment *env, const state &goal) |
Private Attributes | |
| EnvironmentData | learnData |
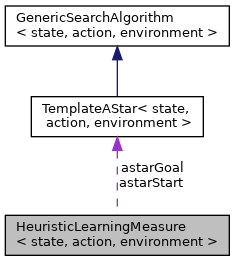
| TemplateAStar< state, action, environment > | astarStart |
| TemplateAStar< state, action, environment > | astarGoal |
| std::vector< state > | queue |
Detailed Description
template<class state, class action, class environment>
class HeuristicLearningMeasure< state, action, environment >
Definition at line 52 of file HeuristicLearningMeasure.h.
Member Typedef Documentation
◆ EnvironmentData
|
private |
Definition at line 106 of file HeuristicLearningMeasure.h.
Member Function Documentation
◆ BuildExactDistances()
|
inlineprivate |
Definition at line 121 of file HeuristicLearningMeasure.h.
References HeuristicLearningMeasure< state, action, environment >::astarGoal, HeuristicLearningMeasure< state, action, environment >::astarStart, TemplateAStar< state, action, environment, openList >::InitializeSearch(), and TemplateAStar< state, action, environment, openList >::SetStopAfterGoal().
Referenced by HeuristicLearningMeasure< state, action, environment >::MeasureDifficultly().
◆ ComputeConsistencyLearning()
|
inlineprivate |
Definition at line 215 of file HeuristicLearningMeasure.h.
References fgreater(), and HeuristicLearningMeasure< state, action, environment >::learnData.
Referenced by HeuristicLearningMeasure< state, action, environment >::MeasureDifficultly().
◆ ComputeRequiredLearning()
|
inlineprivate |
Definition at line 158 of file HeuristicLearningMeasure.h.
References HeuristicLearningMeasure< state, action, environment >::astarGoal, HeuristicLearningMeasure< state, action, environment >::astarStart, fequal(), HeuristicLearningMeasure< state, action, environment >::learnData, HeuristicLearningMeasure< state, action, environment >::LookupGCost(), and HeuristicLearningMeasure< state, action, environment >::LookupHCost().
Referenced by HeuristicLearningMeasure< state, action, environment >::MeasureDifficultly().
◆ LookupGCost()
|
inlineprivate |
Definition at line 134 of file HeuristicLearningMeasure.h.
References HeuristicLearningMeasure< state, action, environment >::astarStart, TemplateAStar< state, action, environment, openList >::DoSingleSearchStep(), and TemplateAStar< state, action, environment, openList >::GetClosedListGCost().
Referenced by HeuristicLearningMeasure< state, action, environment >::ComputeRequiredLearning().
◆ LookupHCost()
|
inlineprivate |
Definition at line 146 of file HeuristicLearningMeasure.h.
References HeuristicLearningMeasure< state, action, environment >::astarGoal, TemplateAStar< state, action, environment, openList >::DoSingleSearchStep(), and TemplateAStar< state, action, environment, openList >::GetClosedListGCost().
Referenced by HeuristicLearningMeasure< state, action, environment >::ComputeRequiredLearning().
◆ MeasureDifficultly()
|
inline |
Definition at line 54 of file HeuristicLearningMeasure.h.
References HeuristicLearningMeasure< state, action, environment >::BuildExactDistances(), HeuristicLearningMeasure< state, action, environment >::ComputeConsistencyLearning(), HeuristicLearningMeasure< state, action, environment >::ComputeRequiredLearning(), HeuristicLearningMeasure< state, action, environment >::learnData, HeuristicLearningMeasure< state, action, environment >::queue, and HeuristicLearningMeasure< state, action, environment >::SumLearningRequired().
◆ OpenGLDraw()
|
inline |
Definition at line 83 of file HeuristicLearningMeasure.h.
References HeuristicLearningMeasure< state, action, environment >::learnData.
◆ ShowHistogram()
|
inline |
Definition at line 67 of file HeuristicLearningMeasure.h.
References HeuristicLearningMeasure< state, action, environment >::learnData.
◆ SumLearningRequired()
|
inlineprivate |
Definition at line 108 of file HeuristicLearningMeasure.h.
References HeuristicLearningMeasure< state, action, environment >::learnData.
Referenced by HeuristicLearningMeasure< state, action, environment >::MeasureDifficultly().
Member Data Documentation
◆ astarGoal
|
private |
Definition at line 307 of file HeuristicLearningMeasure.h.
Referenced by HeuristicLearningMeasure< state, action, environment >::BuildExactDistances(), HeuristicLearningMeasure< state, action, environment >::ComputeRequiredLearning(), and HeuristicLearningMeasure< state, action, environment >::LookupHCost().
◆ astarStart
|
private |
Definition at line 306 of file HeuristicLearningMeasure.h.
Referenced by HeuristicLearningMeasure< state, action, environment >::BuildExactDistances(), HeuristicLearningMeasure< state, action, environment >::ComputeRequiredLearning(), and HeuristicLearningMeasure< state, action, environment >::LookupGCost().
◆ learnData
|
private |
Definition at line 305 of file HeuristicLearningMeasure.h.
Referenced by HeuristicLearningMeasure< state, action, environment >::ComputeConsistencyLearning(), HeuristicLearningMeasure< state, action, environment >::ComputeRequiredLearning(), HeuristicLearningMeasure< state, action, environment >::MeasureDifficultly(), HeuristicLearningMeasure< state, action, environment >::OpenGLDraw(), HeuristicLearningMeasure< state, action, environment >::ShowHistogram(), and HeuristicLearningMeasure< state, action, environment >::SumLearningRequired().
◆ queue
|
private |
Definition at line 308 of file HeuristicLearningMeasure.h.
Referenced by HeuristicLearningMeasure< state, action, environment >::MeasureDifficultly().
The documentation for this class was generated from the following file:
- /home/sturtevant/nightly/hog2/learning/HeuristicLearningMeasure.h
