#include <WeightedVertexGraph.h>
Public Member Functions | |
| BidirectionalProblemAnalyzer (const state &s, const state &g, environment *e, Heuristic< state > *f, Heuristic< state > *b) | |
| void | BuildDataStructures () |
| int | GetMinWork () |
| int | GetForwardWork () |
| int | GetBackwardWork () |
| double | GetForwardMaxG () |
| double | GetMaxG () |
| double | GetBackwardMaxG () |
| size_t | GetNumGCosts () |
| void | SaveSVG (const char *filename) |
| void | SaveSVG (const char *filename, int groupSize) |
Static Public Member Functions | |
| static uint64_t | GetWeightedVertexGraph (const state &start, const state &goal, environment *e, Heuristic< state > *f, Heuristic< state > *b, const char *filename=0) |
Public Attributes | |
| bool | drawFullGraph |
| bool | drawProblemInstance |
| bool | drawMinimumVC |
| bool | drawAllG |
| bool | drawStatistics |
| bool | flipBackwardsGCost |
| bool | drawSumOnEdge |
| bool | drawShortenedEdges |
Private Attributes | |
| state | start |
| state | goal |
| environment * | e |
| Heuristic< state > * | f |
| Heuristic< state > * | b |
| std::map< double, int > | m_f |
| std::map< double, int > | m_b |
| TemplateAStar< state, action, environment > | astarf |
| TemplateAStar< state, action, environment > | astarb |
| int | forwardSum |
| int | backwardSum |
| int | totalWork |
| double | optCost |
| int | height |
| int | width |
| std::string | optCostStr |
| double | forwardOptG |
| double | backwardOptG |
Detailed Description
template<class state, class action, class environment>
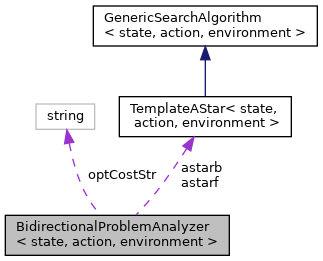
class BidirectionalProblemAnalyzer< state, action, environment >
Definition at line 19 of file WeightedVertexGraph.h.
Constructor & Destructor Documentation
◆ BidirectionalProblemAnalyzer()
|
inline |
Definition at line 21 of file WeightedVertexGraph.h.
References BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), BidirectionalProblemAnalyzer< state, action, environment >::drawAllG, BidirectionalProblemAnalyzer< state, action, environment >::drawFullGraph, BidirectionalProblemAnalyzer< state, action, environment >::drawMinimumVC, BidirectionalProblemAnalyzer< state, action, environment >::drawProblemInstance, BidirectionalProblemAnalyzer< state, action, environment >::drawShortenedEdges, BidirectionalProblemAnalyzer< state, action, environment >::drawStatistics, BidirectionalProblemAnalyzer< state, action, environment >::drawSumOnEdge, and BidirectionalProblemAnalyzer< state, action, environment >::flipBackwardsGCost.
Member Function Documentation
◆ BuildDataStructures()
|
inline |
Definition at line 36 of file WeightedVertexGraph.h.
References BidirectionalProblemAnalyzer< state, action, environment >::astarb, BidirectionalProblemAnalyzer< state, action, environment >::astarf, BidirectionalProblemAnalyzer< state, action, environment >::b, BidirectionalProblemAnalyzer< state, action, environment >::backwardOptG, BidirectionalProblemAnalyzer< state, action, environment >::backwardSum, BidirectionalProblemAnalyzer< state, action, environment >::drawAllG, BidirectionalProblemAnalyzer< state, action, environment >::e, BidirectionalProblemAnalyzer< state, action, environment >::f, fgreatereq(), fless(), BidirectionalProblemAnalyzer< state, action, environment >::forwardOptG, BidirectionalProblemAnalyzer< state, action, environment >::forwardSum, TemplateAStar< state, action, environment, openList >::GetItem(), TemplateAStar< state, action, environment, openList >::GetNecessaryExpansions(), TemplateAStar< state, action, environment, openList >::GetNumItems(), TemplateAStar< state, action, environment, openList >::GetPath(), BidirectionalProblemAnalyzer< state, action, environment >::goal, BidirectionalProblemAnalyzer< state, action, environment >::height, kClosedList, BidirectionalProblemAnalyzer< state, action, environment >::m_b, BidirectionalProblemAnalyzer< state, action, environment >::m_f, max, min(), BidirectionalProblemAnalyzer< state, action, environment >::optCost, BidirectionalProblemAnalyzer< state, action, environment >::optCostStr, path, TemplateAStar< state, action, environment, openList >::SetHeuristic(), BidirectionalProblemAnalyzer< state, action, environment >::start, BidirectionalProblemAnalyzer< state, action, environment >::totalWork, and BidirectionalProblemAnalyzer< state, action, environment >::width.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BidirectionalProblemAnalyzer().
◆ GetBackwardMaxG()
|
inline |
Definition at line 238 of file WeightedVertexGraph.h.
References BidirectionalProblemAnalyzer< state, action, environment >::m_b.
◆ GetBackwardWork()
|
inline |
Definition at line 222 of file WeightedVertexGraph.h.
References BidirectionalProblemAnalyzer< state, action, environment >::backwardSum.
◆ GetForwardMaxG()
|
inline |
Definition at line 227 of file WeightedVertexGraph.h.
References BidirectionalProblemAnalyzer< state, action, environment >::m_f.
◆ GetForwardWork()
|
inline |
Definition at line 217 of file WeightedVertexGraph.h.
References BidirectionalProblemAnalyzer< state, action, environment >::forwardSum.
◆ GetMaxG()
|
inline |
Definition at line 233 of file WeightedVertexGraph.h.
References BidirectionalProblemAnalyzer< state, action, environment >::m_b, BidirectionalProblemAnalyzer< state, action, environment >::m_f, and max.
◆ GetMinWork()
|
inline |
Definition at line 212 of file WeightedVertexGraph.h.
References BidirectionalProblemAnalyzer< state, action, environment >::totalWork.
◆ GetNumGCosts()
|
inline |
Definition at line 243 of file WeightedVertexGraph.h.
References BidirectionalProblemAnalyzer< state, action, environment >::m_b, BidirectionalProblemAnalyzer< state, action, environment >::m_f, and max.
◆ GetWeightedVertexGraph()
|
inlinestatic |
Definition at line 613 of file WeightedVertexGraph.h.
References BidirectionalProblemAnalyzer< state, action, environment >::b, BidirectionalProblemAnalyzer< state, action, environment >::e, BidirectionalProblemAnalyzer< state, action, environment >::f, BidirectionalProblemAnalyzer< state, action, environment >::goal, BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG(), BidirectionalProblemAnalyzer< state, action, environment >::start, and BidirectionalProblemAnalyzer< state, action, environment >::totalWork.
◆ SaveSVG() [1/2]
|
inline |
Definition at line 248 of file WeightedVertexGraph.h.
References BidirectionalProblemAnalyzer< state, action, environment >::astarb, BidirectionalProblemAnalyzer< state, action, environment >::astarf, BidirectionalProblemAnalyzer< state, action, environment >::backwardOptG, BidirectionalProblemAnalyzer< state, action, environment >::backwardSum, Colors::black, BidirectionalProblemAnalyzer< state, action, environment >::drawAllG, BidirectionalProblemAnalyzer< state, action, environment >::drawFullGraph, BidirectionalProblemAnalyzer< state, action, environment >::drawMinimumVC, BidirectionalProblemAnalyzer< state, action, environment >::drawProblemInstance, BidirectionalProblemAnalyzer< state, action, environment >::drawShortenedEdges, BidirectionalProblemAnalyzer< state, action, environment >::drawStatistics, BidirectionalProblemAnalyzer< state, action, environment >::drawSumOnEdge, BidirectionalProblemAnalyzer< state, action, environment >::e, fgreatereq(), fless(), flesseq(), BidirectionalProblemAnalyzer< state, action, environment >::flipBackwardsGCost, BidirectionalProblemAnalyzer< state, action, environment >::forwardOptG, TemplateAStar< state, action, environment, openList >::GetNecessaryExpansions(), BidirectionalProblemAnalyzer< state, action, environment >::goal, BidirectionalProblemAnalyzer< state, action, environment >::height, SVG::kLeft, SVG::kRight, Colors::lightblue, Colors::lightgray, BidirectionalProblemAnalyzer< state, action, environment >::m_b, BidirectionalProblemAnalyzer< state, action, environment >::m_f, max, BidirectionalProblemAnalyzer< state, action, environment >::optCost, BidirectionalProblemAnalyzer< state, action, environment >::optCostStr, BidirectionalProblemAnalyzer< state, action, environment >::start, SVGDrawCircle(), SVGDrawLine(), SVGDrawText(), SVGFrameCircle(), to_string_separator(), BidirectionalProblemAnalyzer< state, action, environment >::totalWork, and BidirectionalProblemAnalyzer< state, action, environment >::width.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::GetWeightedVertexGraph().
◆ SaveSVG() [2/2]
|
inline |
Definition at line 461 of file WeightedVertexGraph.h.
References BidirectionalProblemAnalyzer< state, action, environment >::astarb, BidirectionalProblemAnalyzer< state, action, environment >::astarf, BidirectionalProblemAnalyzer< state, action, environment >::backwardOptG, Colors::black, BidirectionalProblemAnalyzer< state, action, environment >::drawFullGraph, BidirectionalProblemAnalyzer< state, action, environment >::drawMinimumVC, BidirectionalProblemAnalyzer< state, action, environment >::drawProblemInstance, BidirectionalProblemAnalyzer< state, action, environment >::drawStatistics, BidirectionalProblemAnalyzer< state, action, environment >::e, fgreatereq(), fless(), flesseq(), BidirectionalProblemAnalyzer< state, action, environment >::forwardOptG, TemplateAStar< state, action, environment, openList >::GetNecessaryExpansions(), BidirectionalProblemAnalyzer< state, action, environment >::goal, Colors::lightblue, Colors::lightgray, BidirectionalProblemAnalyzer< state, action, environment >::m_b, BidirectionalProblemAnalyzer< state, action, environment >::m_f, max, BidirectionalProblemAnalyzer< state, action, environment >::optCost, BidirectionalProblemAnalyzer< state, action, environment >::optCostStr, BidirectionalProblemAnalyzer< state, action, environment >::start, SVGDrawCircle(), SVGDrawLine(), SVGDrawText(), SVGFrameCircle(), and BidirectionalProblemAnalyzer< state, action, environment >::totalWork.
Member Data Documentation
◆ astarb
|
private |
Definition at line 627 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ astarf
|
private |
Definition at line 626 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ b
|
private |
Definition at line 623 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), and BidirectionalProblemAnalyzer< state, action, environment >::GetWeightedVertexGraph().
◆ backwardOptG
|
private |
Definition at line 635 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ backwardSum
|
private |
Definition at line 629 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), BidirectionalProblemAnalyzer< state, action, environment >::GetBackwardWork(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ drawAllG
| bool BidirectionalProblemAnalyzer< state, action, environment >::drawAllG |
Definition at line 641 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BidirectionalProblemAnalyzer(), BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ drawFullGraph
| bool BidirectionalProblemAnalyzer< state, action, environment >::drawFullGraph |
Definition at line 638 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BidirectionalProblemAnalyzer(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ drawMinimumVC
| bool BidirectionalProblemAnalyzer< state, action, environment >::drawMinimumVC |
Definition at line 640 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BidirectionalProblemAnalyzer(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ drawProblemInstance
| bool BidirectionalProblemAnalyzer< state, action, environment >::drawProblemInstance |
Definition at line 639 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BidirectionalProblemAnalyzer(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ drawShortenedEdges
| bool BidirectionalProblemAnalyzer< state, action, environment >::drawShortenedEdges |
Definition at line 645 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BidirectionalProblemAnalyzer(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ drawStatistics
| bool BidirectionalProblemAnalyzer< state, action, environment >::drawStatistics |
Definition at line 642 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BidirectionalProblemAnalyzer(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ drawSumOnEdge
| bool BidirectionalProblemAnalyzer< state, action, environment >::drawSumOnEdge |
Definition at line 644 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BidirectionalProblemAnalyzer(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ e
|
private |
Definition at line 622 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), BidirectionalProblemAnalyzer< state, action, environment >::GetWeightedVertexGraph(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ f
|
private |
Definition at line 623 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), and BidirectionalProblemAnalyzer< state, action, environment >::GetWeightedVertexGraph().
◆ flipBackwardsGCost
| bool BidirectionalProblemAnalyzer< state, action, environment >::flipBackwardsGCost |
Definition at line 643 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BidirectionalProblemAnalyzer(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ forwardOptG
|
private |
Definition at line 634 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ forwardSum
|
private |
Definition at line 628 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), and BidirectionalProblemAnalyzer< state, action, environment >::GetForwardWork().
◆ goal
|
private |
Definition at line 621 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), BidirectionalProblemAnalyzer< state, action, environment >::GetWeightedVertexGraph(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ height
|
private |
Definition at line 632 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ m_b
|
private |
Definition at line 624 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), BidirectionalProblemAnalyzer< state, action, environment >::GetBackwardMaxG(), BidirectionalProblemAnalyzer< state, action, environment >::GetMaxG(), BidirectionalProblemAnalyzer< state, action, environment >::GetNumGCosts(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ m_f
|
private |
Definition at line 624 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), BidirectionalProblemAnalyzer< state, action, environment >::GetForwardMaxG(), BidirectionalProblemAnalyzer< state, action, environment >::GetMaxG(), BidirectionalProblemAnalyzer< state, action, environment >::GetNumGCosts(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ optCost
|
private |
Definition at line 631 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ optCostStr
|
private |
Definition at line 633 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ start
|
private |
Definition at line 621 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), BidirectionalProblemAnalyzer< state, action, environment >::GetWeightedVertexGraph(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ totalWork
|
private |
Definition at line 630 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), BidirectionalProblemAnalyzer< state, action, environment >::GetMinWork(), BidirectionalProblemAnalyzer< state, action, environment >::GetWeightedVertexGraph(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
◆ width
|
private |
Definition at line 632 of file WeightedVertexGraph.h.
Referenced by BidirectionalProblemAnalyzer< state, action, environment >::BuildDataStructures(), and BidirectionalProblemAnalyzer< state, action, environment >::SaveSVG().
The documentation for this class was generated from the following file:
- /home/sturtevant/nightly/hog2/generic/WeightedVertexGraph.h
