#include <Heuristic.h>
Public Member Functions | |
| Heuristic () | |
| virtual | ~Heuristic () |
| virtual double | HCost (const state &a, const state &b) const |
Public Attributes | |
| std::vector< HeuristicTreeNode > | lookups |
| std::vector< Heuristic * > | heuristics |
| uint64_t | histogram [256] |
Private Member Functions | |
| double | HCost (const state &s1, const state &s2, int treeNode) const |
Detailed Description
template<class state>
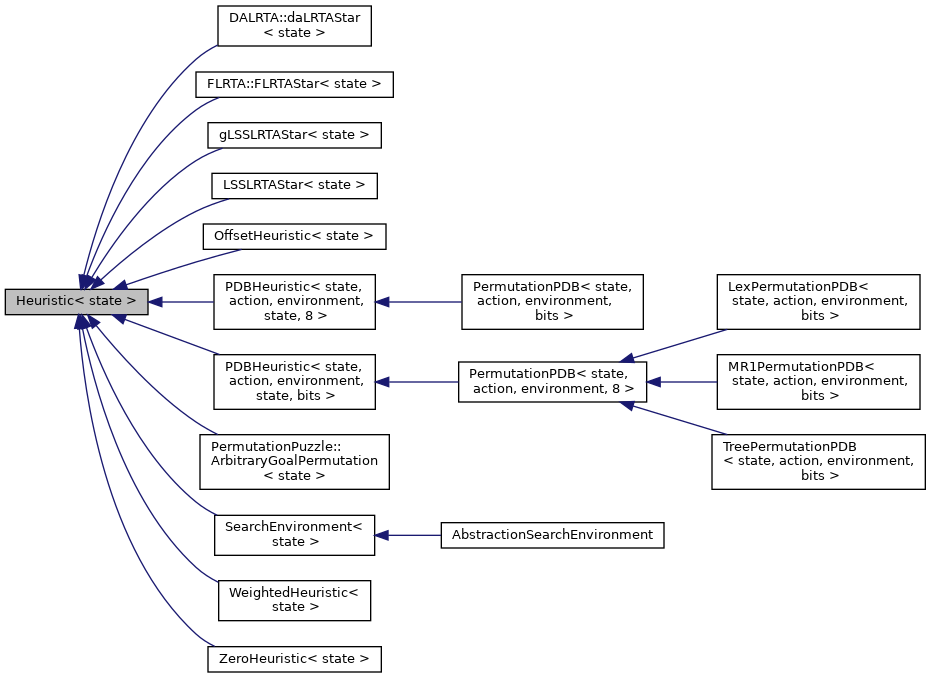
class Heuristic< state >
Definition at line 30 of file Heuristic.h.
Constructor & Destructor Documentation
◆ Heuristic()
Definition at line 32 of file Heuristic.h.
◆ ~Heuristic()
Definition at line 33 of file Heuristic.h.
Member Function Documentation
◆ HCost() [1/2]
|
virtual |
Reimplemented in SearchEnvironment< xytLoc, tDirection >, Map2DConstrainedEnvironment, SearchEnvironment< xySpeedHeading, deltaSpeedHeading >, Directional2DEnvironment, SearchEnvironment< xyLoc, tDirection >, DWG::DynamicWeightedGridEnvironment, MapEnvironment, EuclideanDistance, SearchEnvironment< xyhLoc, xyhAct >, Map2DHeading, SearchEnvironment< WitnessState< width, height >, WitnessAction >, Witness< width, height >, SearchEnvironment< voxelState, voxelAction >, Voxels, SearchEnvironment< voxelGridState, voxelGridAction >, VoxelGrid, PDBHeuristic< TOHState< patternDisks >, TOHMove, TOH< patternDisks >, TOHState< totalDisks > >, SearchEnvironment< TOHState< disks >, TOHMove >, TOH< disks >, TOH< patternDisks >, SearchEnvironment< steeringState, steeringAction >, SteeringEnvironment, SearchEnvironment< state3d, action3d >, Map3DGrid, SearchEnvironment< state, action >, FLRTA::FLRTAStar< state, action, environment >, gLSSLRTAStar< state, action, environment >, LSSLRTAStar< state, action, environment >, DALRTA::daLRTAStar< state, action, environment >, PermutationPuzzle::ArbitraryGoalPermutation< state, environment >, PDBHeuristic< state, action, environment, state, bits >, PDBHeuristic< state, action, environment, state, 8 >, OffsetHeuristic< state >, WeightedHeuristic< state >, ZeroHeuristic< state >, SearchEnvironment< SnakeBirdState, SnakeBirdAction >, SearchEnvironment< SequenceAlignmentState, SequenceAlignmentAction >, SequenceAlignment, SearchEnvironment< RubiksState, RubiksAction >, RubiksCube, RubikArbitraryGoalPDB, RubikDualPDB, PDBHeuristic< RubiksState, RubiksAction, RubiksCube, RubiksState, 4 >, SearchEnvironment< RubiksCornerState, RubiksCornersAction >, RubiksCorner, PDBHeuristic< RubiksCornerState, RubiksCornersAction, RubiksCorner, RubiksCornerState, 4 >, SearchEnvironment< RubikEdgeState, RubikEdgeAction >, RubikEdge, PDBHeuristic< RubikEdgeState, RubikEdgeAction, RubikEdge, RubikEdgeState, 4 >, SearchEnvironment< Rubik7EdgeState, Rubik7EdgeAction >, Rubik7Edge, SearchEnvironment< recVec, line2d >, ConfigEnvironment, SearchEnvironment< RCState, RCAction >, RC, PDBHeuristic< RCState, RCAction, RC, RCState, 4 >, SearchEnvironment< RacetrackState, RacetrackMove >, Racetrack, SFBDPancakeEnvironment, SearchEnvironment< pancakeStatePair, pancakeMovePair >, SearchEnvironment< NQueenState, NQueenAction >, NQueens, SearchEnvironment< NaryState, NaryAction >, NaryTree, SearchEnvironment< MountainCarState, MountainCarAction >, MountainCarEnvironment, SearchEnvironment< MNAgentPuzzleState, tAgentAction >, MNAgentEnvironment, SearchEnvironment< mcMovementState, mcMovementAction >, MCEnvironment, SearchEnvironment< intersection, neighbor >, RoadMap, SearchEnvironment< HexagonState, HexagonAction >, Hexagon, SearchEnvironment< HexagonSearchState, HexagonAction >, HexagonEnvironment, GraphEnvironment, AbsGraphEnvironment, GraphRefinementEnvironment, SearchEnvironment< graphState, graphMove >, GraphInconsistencyExamples::GraphHeuristic, FlipSide, SearchEnvironment< FlipSideState, flipMove >, SearchEnvironment< FlingBoard, FlingMove >, Fling, CanonicalGraphEnvironment, SearchEnvironment< canGraphState, graphMove >, BurnedPancakePuzzle, SearchEnvironment< BurnedPancakePuzzleState, unsigned >, SearchEnvironment< armAngles, armRotations >, RoboticArm, SearchEnvironment< airplaneState, airplaneAction >, AirplaneEnvironment, SearchEnvironment< abstractState, edge >, SearchEnvironment< abstractGridState, abstractMove >, and Map2DSectorAbstraction.
Definition at line 73 of file Heuristic.h.
Referenced by PDBHeuristic< TOHState< patternDisks >, TOHMove, TOH< patternDisks >, TOHState< totalDisks > >::DeltaCompress(), MeroB::DoSingleStepA(), MeroB::DoSingleStepB(), MeroB::DoSingleStepBP(), MM< state, action, environment, priorityQueue >::Expand(), NBS< state, action, environment, dataStructure, priorityQueue >::Expand(), fMM< state, action, environment, priorityQueue >::Expand(), DVCBS< state, action, environment, dataStructure, priorityQueue >::Expand(), IncrementalBGS< state, action >::InitializeSearch(), IncrementalIDA< state, action >::InitializeSearch(), BOAStar< state, action, environment >::InitializeSearch(), IncrementalBTS< state, action >::InitializeSearch(), MeroB::InitializeSearch(), and MeasureHeuristicErrors().
◆ HCost() [2/2]
|
private |
Definition at line 79 of file Heuristic.h.
Member Data Documentation
◆ heuristics
Definition at line 36 of file Heuristic.h.
◆ histogram
|
mutable |
Definition at line 37 of file Heuristic.h.
Referenced by Heuristic< Rubik7EdgeState >::Heuristic().
◆ lookups
| std::vector<HeuristicTreeNode> Heuristic< state >::lookups |
Definition at line 35 of file Heuristic.h.
The documentation for this class was generated from the following file:
- /home/sturtevant/nightly/hog2/search/Heuristic.h
