#include <EpisodicSimulation.h>
Public Member Functions | |
| EpisodicSimulation (environment *e) | |
| virtual | ~EpisodicSimulation () |
| int | AddUnit (Unit< state, action, environment > *u, double timeOffset=0.) |
| int | AddNonRacingUnit (Unit< state, action, environment > *u, double timeOffset=0.) |
| virtual bool | Done () |
| void | SetStopOnConvergence (bool stop) |
| void | SetTargetTolerance (double x) |
| double | GetTargetTolerance () |
| void | SetDisjunctiveTrialEnd (bool value) |
| int | GetCurrRound () |
| void | SetTravelLimit (double lim) |
| void | SetTrialLimit (long maxTrials) |
| void | DisableTravelLimit () |
| virtual void | ClearAllUnits () |
 Public Member Functions inherited from UnitSimulation< state, action, environment > Public Member Functions inherited from UnitSimulation< state, action, environment > | |
| UnitSimulation (environment *se) | |
| virtual | ~UnitSimulation () |
| unsigned int | GetNumUnits () const |
| Unit< state, action, environment > * | GetUnit (unsigned int which) |
| unsigned int | GetNumUnitGroups () const |
| int | AddUnitGroup (UnitGroup< state, action, environment > *ug) |
| UnitGroup< state, action, environment > * | GetUnitGroup (unsigned int which) |
| virtual void | GetPublicUnitInfo (unsigned int which, PublicUnitInfo< state, action, environment > &info) const |
| environment * | GetEnvironment () |
| void | StepTime (double) |
| double | GetSimulationTime () const |
| double | GetTimeToNextStep () const |
| void | SetStepType (tTimestep step) |
| tTimestep | GetStepType () const |
| void | SetPaused (bool val) |
| bool | GetPaused () |
| bool | Done () |
| void | SetThinkingPenalty (double pen) |
| setPenalty for thinking. More... | |
| double | GetThinkingPenalty () |
| getPenalty for thinking. More... | |
| virtual void | OpenGLDraw () const |
| virtual void | OpenGLDraw (unsigned int whichUnit) const |
| void | SetLogStats (bool val) |
| bool | GetLogStats () |
| StatCollection * | GetStats () |
| virtual SimulationInfo< state, action, environment > * | GetSimulationInfo () |
| virtual unsigned int | GetCurrentUnit () const |
| Public Member Functions inherited from SimulationInfo< state, action, environment > | |
| virtual | ~SimulationInfo () |
Protected Member Functions | |
| virtual void | DoPreTimestepCalc () |
| virtual void | DoTimestepCalc (double amount) |
| virtual bool | EpisodeDone () |
| tUnitOnTargetStatus | UnitOnTargetStatus (UnitInfo< state, action, environment > *u) |
| bool | UnitOnTarget (UnitInfo< state, action, environment > *u) |
| bool | IsUnitRacing (UnitInfo< state, action, environment > *u) |
| Protected Member Functions inherited from UnitSimulation< state, action, environment > | |
| void | StepUnitTime (UnitInfo< state, action, environment > *ui, double timeStep) |
| step time for a single unit. More... | |
| bool | MakeUnitMove (UnitInfo< state, action, environment > *theUnit, action where, double &moveCost) |
| virtual void | DoPostTimestepCalc () |
Protected Attributes | |
| bool | allRacesDone |
| int | currRound |
| double | travelLimit |
| bool | useTravelLimit |
| bool | stopOnConvergence |
| long | maxRounds |
| bool | useMaxRounds |
| double | targetTolerance |
| bool | disjunctiveTrialEnd |
| bool | verbose |
| std::vector< bool > | racingInfo |
| Protected Attributes inherited from UnitSimulation< state, action, environment > | |
| double | penalty |
| bool | paused |
| bool | logStats |
| std::vector< UnitInfo< state, action, environment > * > | units |
| std::vector< UnitGroup< state, action, environment > * > | unitGroups |
| environment * | env |
| double | currTime |
| tTimestep | stepType |
| StatCollection | stats |
| unsigned int | currentActor |
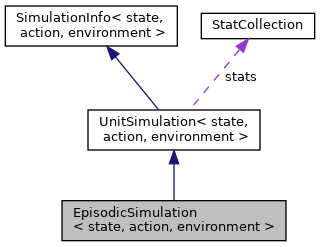
Detailed Description
template<class state, class action, class environment>
class EpisodicSimulation< state, action, environment >
Definition at line 29 of file EpisodicSimulation.h.
Constructor & Destructor Documentation
◆ EpisodicSimulation()
|
inline |
Definition at line 31 of file EpisodicSimulation.h.
References EpisodicSimulation< state, action, environment >::allRacesDone, EpisodicSimulation< state, action, environment >::currRound, EpisodicSimulation< state, action, environment >::disjunctiveTrialEnd, EpisodicSimulation< state, action, environment >::stopOnConvergence, EpisodicSimulation< state, action, environment >::targetTolerance, EpisodicSimulation< state, action, environment >::useMaxRounds, EpisodicSimulation< state, action, environment >::useTravelLimit, and EpisodicSimulation< state, action, environment >::verbose.
◆ ~EpisodicSimulation()
|
inlinevirtual |
Definition at line 44 of file EpisodicSimulation.h.
Member Function Documentation
◆ AddNonRacingUnit()
|
inline |
Definition at line 54 of file EpisodicSimulation.h.
References UnitSimulation< state, action, environment >::AddUnit(), EpisodicSimulation< state, action, environment >::allRacesDone, and EpisodicSimulation< state, action, environment >::racingInfo.
◆ AddUnit()
|
inlinevirtual |
- Parameters
-
timeOffset is a setting to let the unit start a little bit later
Reimplemented from UnitSimulation< state, action, environment >.
Definition at line 45 of file EpisodicSimulation.h.
References UnitSimulation< state, action, environment >::AddUnit(), and EpisodicSimulation< state, action, environment >::racingInfo.
◆ ClearAllUnits()
|
inlinevirtual |
Reimplemented from UnitSimulation< state, action, environment >.
Definition at line 75 of file EpisodicSimulation.h.
References EpisodicSimulation< state, action, environment >::allRacesDone, UnitSimulation< state, action, environment >::ClearAllUnits(), and EpisodicSimulation< state, action, environment >::currRound.
◆ DisableTravelLimit()
|
inline |
Definition at line 74 of file EpisodicSimulation.h.
References EpisodicSimulation< state, action, environment >::useTravelLimit.
◆ Done()
|
inlinevirtual |
Definition at line 65 of file EpisodicSimulation.h.
References EpisodicSimulation< state, action, environment >::allRacesDone.
◆ DoPreTimestepCalc()
|
inlineprotectedvirtual |
Reimplemented from UnitSimulation< state, action, environment >.
Definition at line 79 of file EpisodicSimulation.h.
References StatCollection::AddStat(), EpisodicSimulation< state, action, environment >::allRacesDone, EpisodicSimulation< state, action, environment >::currRound, UnitSimulation< state, action, environment >::currTime, EpisodicSimulation< state, action, environment >::disjunctiveTrialEnd, UnitSimulation< state, action, environment >::env, EpisodicSimulation< state, action, environment >::EpisodeDone(), EpisodicSimulation< state, action, environment >::IsUnitRacing(), kReachedTarget, EpisodicSimulation< state, action, environment >::maxRounds, UnitSimulation< state, action, environment >::stats, EpisodicSimulation< state, action, environment >::stopOnConvergence, UnitSimulation< state, action, environment >::unitGroups, EpisodicSimulation< state, action, environment >::UnitOnTarget(), EpisodicSimulation< state, action, environment >::UnitOnTargetStatus(), UnitSimulation< state, action, environment >::units, EpisodicSimulation< state, action, environment >::useMaxRounds, and EpisodicSimulation< state, action, environment >::verbose.
◆ DoTimestepCalc()
|
inlineprotectedvirtual |
Reimplemented from UnitSimulation< state, action, environment >.
Definition at line 237 of file EpisodicSimulation.h.
References EpisodicSimulation< state, action, environment >::allRacesDone, and UnitSimulation< state, action, environment >::DoTimestepCalc().
◆ EpisodeDone()
|
inlineprotectedvirtual |
Definition at line 243 of file EpisodicSimulation.h.
References UnitSimulation< state, action, environment >::units.
Referenced by EpisodicSimulation< state, action, environment >::DoPreTimestepCalc().
◆ GetCurrRound()
|
inline |
Definition at line 71 of file EpisodicSimulation.h.
References EpisodicSimulation< state, action, environment >::currRound.
◆ GetTargetTolerance()
|
inline |
Definition at line 68 of file EpisodicSimulation.h.
References EpisodicSimulation< state, action, environment >::targetTolerance.
◆ IsUnitRacing()
|
inlineprotected |
Definition at line 288 of file EpisodicSimulation.h.
References UnitInfo< state, action, environment >::agent, and EpisodicSimulation< state, action, environment >::racingInfo.
Referenced by EpisodicSimulation< state, action, environment >::DoPreTimestepCalc().
◆ SetDisjunctiveTrialEnd()
|
inline |
Definition at line 69 of file EpisodicSimulation.h.
References EpisodicSimulation< state, action, environment >::disjunctiveTrialEnd.
◆ SetStopOnConvergence()
|
inline |
Definition at line 66 of file EpisodicSimulation.h.
References EpisodicSimulation< state, action, environment >::stopOnConvergence.
◆ SetTargetTolerance()
|
inline |
Definition at line 67 of file EpisodicSimulation.h.
References EpisodicSimulation< state, action, environment >::targetTolerance.
◆ SetTravelLimit()
|
inline |
Definition at line 72 of file EpisodicSimulation.h.
References EpisodicSimulation< state, action, environment >::travelLimit, and EpisodicSimulation< state, action, environment >::useTravelLimit.
◆ SetTrialLimit()
|
inline |
Definition at line 73 of file EpisodicSimulation.h.
References EpisodicSimulation< state, action, environment >::maxRounds, and EpisodicSimulation< state, action, environment >::useMaxRounds.
◆ UnitOnTarget()
|
inlineprotected |
Definition at line 278 of file EpisodicSimulation.h.
References kNoTarget, kNotOnTarget, kOutOfTravel, kReachedTarget, and EpisodicSimulation< state, action, environment >::UnitOnTargetStatus().
Referenced by EpisodicSimulation< state, action, environment >::DoPreTimestepCalc().
◆ UnitOnTargetStatus()
|
inlineprotected |
Definition at line 259 of file EpisodicSimulation.h.
References UnitInfo< state, action, environment >::agent, kNotOnTarget, kOutOfTravel, kReachedTarget, UnitInfo< state, action, environment >::totalDistance, EpisodicSimulation< state, action, environment >::travelLimit, and EpisodicSimulation< state, action, environment >::useTravelLimit.
Referenced by EpisodicSimulation< state, action, environment >::DoPreTimestepCalc(), and EpisodicSimulation< state, action, environment >::UnitOnTarget().
Member Data Documentation
◆ allRacesDone
|
protected |
Definition at line 296 of file EpisodicSimulation.h.
Referenced by EpisodicSimulation< state, action, environment >::AddNonRacingUnit(), EpisodicSimulation< state, action, environment >::ClearAllUnits(), EpisodicSimulation< state, action, environment >::Done(), EpisodicSimulation< state, action, environment >::DoPreTimestepCalc(), EpisodicSimulation< state, action, environment >::DoTimestepCalc(), and EpisodicSimulation< state, action, environment >::EpisodicSimulation().
◆ currRound
|
protected |
Definition at line 297 of file EpisodicSimulation.h.
Referenced by EpisodicSimulation< state, action, environment >::ClearAllUnits(), EpisodicSimulation< state, action, environment >::DoPreTimestepCalc(), EpisodicSimulation< state, action, environment >::EpisodicSimulation(), and EpisodicSimulation< state, action, environment >::GetCurrRound().
◆ disjunctiveTrialEnd
|
protected |
◆ maxRounds
|
protected |
Definition at line 301 of file EpisodicSimulation.h.
Referenced by EpisodicSimulation< state, action, environment >::DoPreTimestepCalc(), and EpisodicSimulation< state, action, environment >::SetTrialLimit().
◆ racingInfo
|
protected |
◆ stopOnConvergence
|
protected |
◆ targetTolerance
|
protected |
◆ travelLimit
|
protected |
Definition at line 298 of file EpisodicSimulation.h.
Referenced by EpisodicSimulation< state, action, environment >::SetTravelLimit(), and EpisodicSimulation< state, action, environment >::UnitOnTargetStatus().
◆ useMaxRounds
|
protected |
◆ useTravelLimit
|
protected |
Definition at line 299 of file EpisodicSimulation.h.
Referenced by EpisodicSimulation< state, action, environment >::DisableTravelLimit(), EpisodicSimulation< state, action, environment >::EpisodicSimulation(), EpisodicSimulation< state, action, environment >::SetTravelLimit(), and EpisodicSimulation< state, action, environment >::UnitOnTargetStatus().
◆ verbose
|
protected |
Definition at line 305 of file EpisodicSimulation.h.
Referenced by EpisodicSimulation< state, action, environment >::DoPreTimestepCalc(), and EpisodicSimulation< state, action, environment >::EpisodicSimulation().
The documentation for this class was generated from the following file:
- /home/sturtevant/nightly/hog2/simulation/EpisodicSimulation.h
