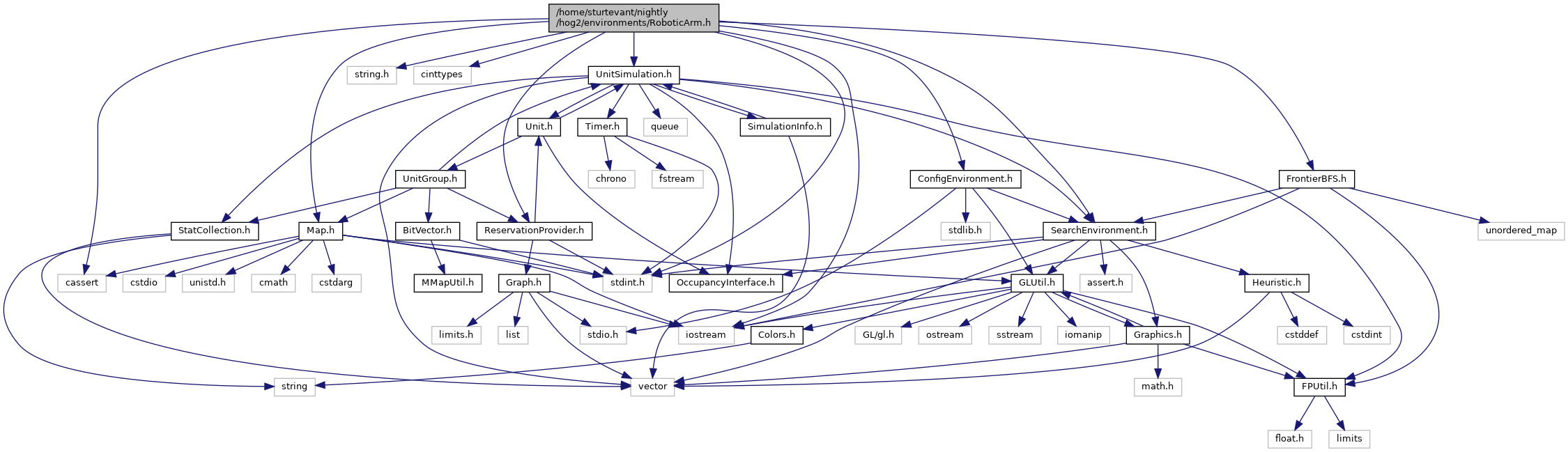
#include <stdint.h>#include <iostream>#include <string.h>#include <cinttypes>#include "Map.h"#include "SearchEnvironment.h"#include "UnitSimulation.h"#include "ReservationProvider.h"#include "ConfigEnvironment.h"#include "FrontierBFS.h"#include <cassert>
Include dependency graph for RoboticArm.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | armAngles |
| class | armRotations |
| class | RoboticArmHeuristic |
| class | RoboticArm |
| class | ArmToArmHeuristic |
| class | ArmToArmCompressedHeuristic |
| class | ArmToTipHeuristic |
Enumerations | |
| enum | tRotation { kRotateCCW = -1, kNoRotation = 0, kRotateCW = 1 } |
Functions | |
| static std::ostream & | operator<< (std::ostream &out, const armAngles &loc) |
| static bool | operator== (const armAngles &l1, const armAngles &l2) |
| static bool | operator== (const armRotations &l1, const armRotations &l2) |
Enumeration Type Documentation
◆ tRotation
| enum tRotation |
| Enumerator | |
|---|---|
| kRotateCCW | |
| kNoRotation | |
| kRotateCW | |
Definition at line 63 of file RoboticArm.h.
Function Documentation
◆ operator<<()
|
static |
Definition at line 42 of file RoboticArm.h.
◆ operator==() [1/2]
Definition at line 59 of file RoboticArm.h.
References armAngles::angles.
◆ operator==() [2/2]
|
static |
Definition at line 78 of file RoboticArm.h.
References armRotations::rotations.
